![]()
Simple kinematics body toolkit.
- Pure python library.
- Support URDF, SDF and MJCF file.
- Calculate FK, IK and jacobian.

pip install kinpy
Here is a program that reads urdf and generates a kinematic chain.
import kinpy as kp
chain = kp.build_chain_from_urdf(open("kuka_iiwa/model.urdf").read())
print(chain)
# lbr_iiwa_link_0_frame
# └──── lbr_iiwa_link_1_frame
# └──── lbr_iiwa_link_2_frame
# └──── lbr_iiwa_link_3_frame
# └──── lbr_iiwa_link_4_frame
# └──── lbr_iiwa_link_5_frame
# └──── lbr_iiwa_link_6_frame
# └──── lbr_iiwa_link_7_frameDisplays the parameter names of joint angles included in the chain.
print(chain.get_joint_parameter_names())
# ['lbr_iiwa_joint_1', 'lbr_iiwa_joint_2', 'lbr_iiwa_joint_3', 'lbr_iiwa_joint_4', 'lbr_iiwa_joint_5', 'lbr_iiwa_joint_6', 'lbr_iiwa_joint_7']Given joint angle values, calculate forward kinematics.
import math
th = {'lbr_iiwa_joint_2': math.pi / 4.0, 'lbr_iiwa_joint_4': math.pi / 2.0}
ret = chain.forward_kinematics(th)
# {'lbr_iiwa_link_0': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.]), 'lbr_iiwa_link_1': Transform(rot=[1. 0. 0. 0.], pos=[0. 0. 0.1575]), 'lbr_iiwa_link_2': Transform(rot=[-0.27059805 0.27059805 0.65328148 0.65328148], pos=[0. 0. 0.36]), 'lbr_iiwa_link_3': Transform(rot=[-9.23879533e-01 3.96044251e-14 -3.82683432e-01 -1.96942462e-12], pos=[ 1.44603337e-01 -6.78179735e-13 5.04603337e-01]), 'lbr_iiwa_link_4': Transform(rot=[-0.65328148 -0.65328148 0.27059805 -0.27059805], pos=[ 2.96984848e-01 -3.37579445e-13 6.56984848e-01]), 'lbr_iiwa_link_5': Transform(rot=[ 2.84114655e-12 3.82683432e-01 -1.87377891e-12 -9.23879533e-01], pos=[ 1.66523647e-01 -1.00338887e-12 7.87446049e-01]), 'lbr_iiwa_link_6': Transform(rot=[-0.27059805 0.27059805 -0.65328148 -0.65328148], pos=[ 1.41421356e-02 -7.25873884e-13 9.39827561e-01]), 'lbr_iiwa_link_7': Transform(rot=[ 9.23879533e-01 2.61060896e-12 -3.82683432e-01 4.81056861e-12], pos=[-4.31335137e-02 -1.01819561e-12 9.97103210e-01])}You can get the position and orientation of each link.
If you want to use IK or Jacobian, you need to create a SerialChain.
When creating a SerialChain, an end effector must be specified.
chain = kp.build_serial_chain_from_urdf(open("kuka_iiwa/model.urdf"), "lbr_iiwa_link_7")
th = [0.0, -math.pi / 4.0, 0.0, math.pi / 2.0, 0.0, math.pi / 4.0, 0.0]
ret = chain.forward_kinematics(th, end_only=True)
# chain.inverse_kinematics(ret)
# chain.jacobian(th)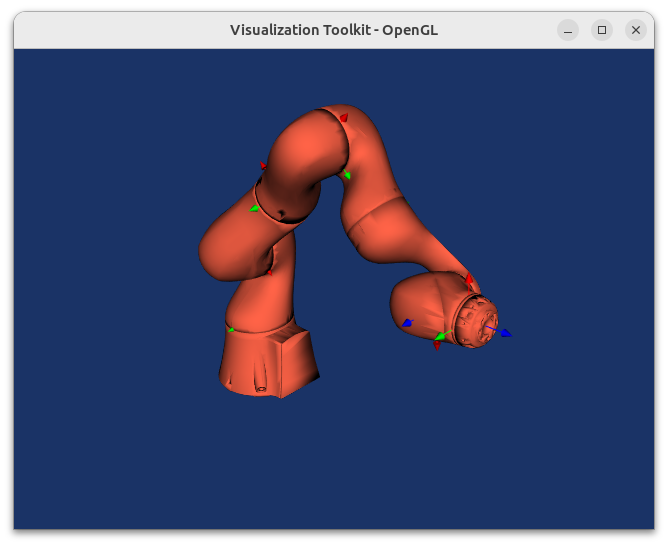
@software{kinpy,
author = {{Kenta-Tanaka et al.}},
title = {kinpy},
url = {https://github.com/neka-nat/kinpy},
version = {0.0.3},
date = {2019-10-11},
}